Home > Resources > Knowledge Base >


0
- No products in the cart.
0
- No products in the cart.
0
- No products in the cart.
How can I extract data from the OPC UA Server?
How can I extract data from the OPC UA Server?
Remark: for more information on the variable node addressing you can download the OPC UA guide on our “Resources” page.
All recorded data can be extracted via the built-in OPC UA Server. The OPC UA Server always listens on port 4840 regardless if the connection is made via cable, hotspot or WiFi.
If you use the hotspot connection, this will be 192.168.42.1:4840.
If you use another connection type, you need to use the IP address of the iQunet Server (xxx.xxx.xx.xx:4840). You can find the current IP address of the server in the network as explained in the “IP address” section.
To extract data via OPC, you can use UAExpert for example.
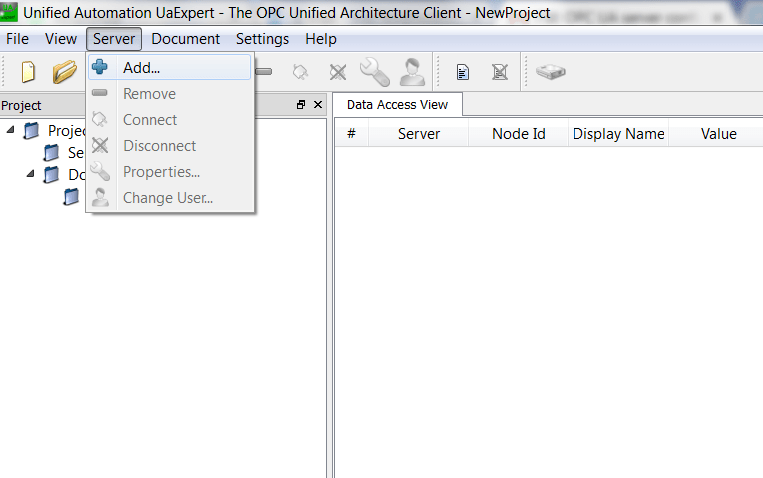
Open UA Expert and click on Server –> Add.
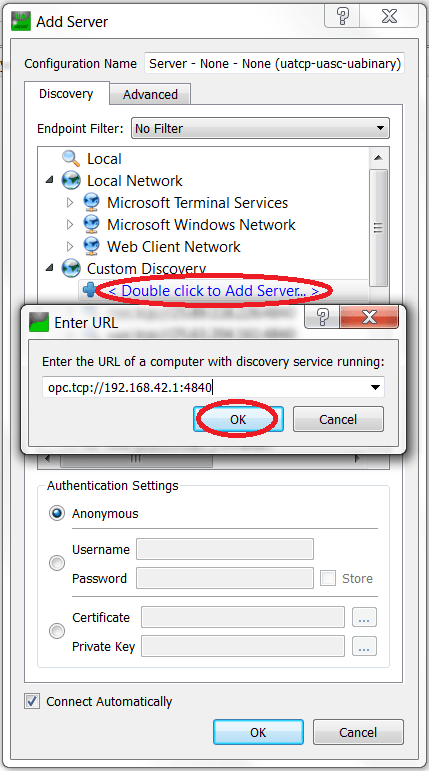
Double click on “Double click to Add Server” and fill out the IP address behind opc.tcp://. Click OK.
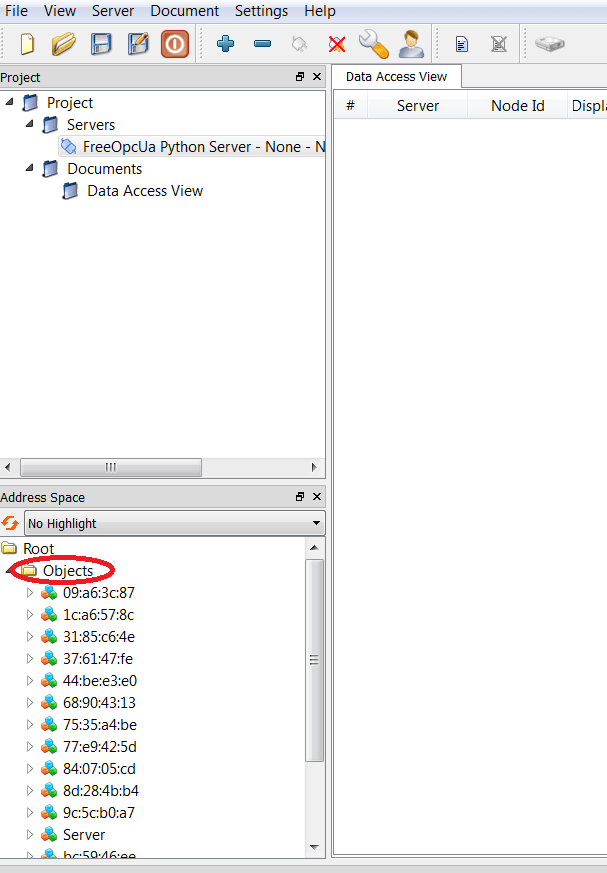
Select the added server in the server list. All sensors connected to this server will appear in the Address Space.
Click on the macId of the sensor to see all possible attributes of the sensor.
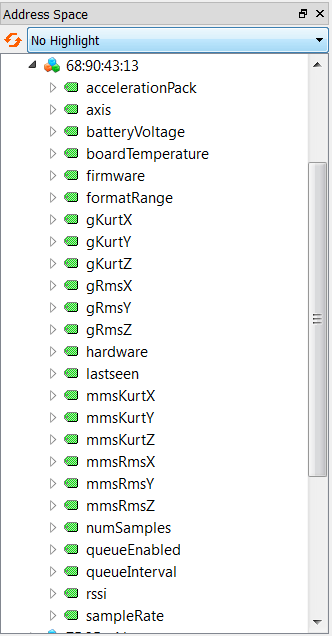
Add a document to inspect for example the board temperature data (Document –> Add). Select ‘History Trend View’ as the document type and click ‘Add’.
Drag the boardTemperature attribute of the sensor to the configuration window.

Temperature read-out is possible via either a single update that extracts all data values in between two points of time at once or via a cyclic update that extracts all data over the set timespan every set time interval (update interval).
The accelerationPack attribute contains the raw vibration data. The accelerationPack format is as follows:
1/ numSamples: n = #samples
2/ accelArray: rawSample[0:n-1]
3/ sampleRate: e.g. 400 = 400Hz
4/ formatRange: e.g. 4 = +/-4g (hardware setting of the accelerometer IC)
5/ offset: unused, 0 (hardware offset of the accelerometer IC)
6/ encoded_axis: X = 0, Y = 1, Z = 2
7/ prescaler: unused (only used when no compression in debug mode)
8/ compression: unused (0 = no compression in debug mode, 1 = compression)
You will see that the first 7 samples of the accelArray (at the start of each measurement) show a transient response due to the start-up behavior of the compression algorithm. Since a Hanning window is used for the calculation of the DFT and RMS, this behavior will be automatically suppressed and has thus no further impact.
The conversion of the accelArray to g units is as follows:
Conversion of rawSample[0:n-1] to [g]:
gSample = rawSample[0:n-1]/512.0*formatRange [g]
gTimes = [0:n-1]/sampleRate [sec]
Remark: we advise to use the processed vibration struct node for a one-to-one relation between the iQunet Sensor Dashboard and the output OPC UA data. If you use this node, it is not necessary to convert the data to g units anymore. See the OPC UA guide for more information on the vibration struct.